采用STM32和ADS1298开发12导心电测量仪。ADS1298配置为continuous模式已经工作正常,现在要改为single-shot模式。在single-shot模式下,能正确读取芯片ID,也能正确判断导联是否脱落,但ADC的数据明显不正确。主要代码如下:
1、ADS1298寄存器配置
uint8_t RegisterData[25] = {0xC2, //0x82, 0x03, /* CONFIG1 */ //8kSPS
0x10, /* CONFIG2 */ //RLD
0xDC,/*0xD4*/ /* CONFIG3 */
0x07/*0x0F*/, /* LOFF *///
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,/*CHnSET*/
0xFF, /* RLD_SENSP *///
0xFF, /* RLD_SENSN *///
0xFF, /* LOFF_SENSP *///所有通道的正端均进行脱落检测
0xFF, /* LOFF_SENSN *///所有通道的负端均进行脱落检测
0x00, /* LOFF_FLIP */
0, /* LOFF_STATP,导联正端连接状态,只读,不需要设*/
0, /* LOFF_STATN,导联负端连接状态,只读,不需要设*/
0, /* GPIO */
0, /* PACE */
0xF0, /* RESP */
0x2E,//0x2A/*0x22*/, /* CONFIG4 */ //采用0x2A或0x2E为单次模式,采用0x22为连续AD模式
0x0B, /* WCT1 *///WCT配置管脚
0xE2 /* WCT2 */
};
2、ADS1298初始化部分程序
void ADS1298_Init( void )
{
uint8_t device_id = 0;
ADS1298_IO_Init();//硬件端口初始化
ADS1298_PIN_CS = LOW;
ADS1298_RESET();
device_id = ADS1298_GetID();
if( device_id == 0x92 ) //ID正确
{
ADS1298_WriteMultiReg( ADS1298_CONFIG1_REG, RegisterData, 25 ); //配置ADS1298
}
else
{
}
}
3、读取数据子程序
void ADS1298_ReadDataOneShot() // use in Stop Read Continuous mode when DRDY goes low
{
uint8_t inByte, inByte1, inByte2, inByte3;
int i;
uint32_t stat_1 = 0;
for( i = 0; i < 8; i++ )
{
ADSChannelData[i] = 0;
}
ADS1298_WriteCmd( ADS1298_CMD_RDATA );
// READ CHANNEL DATA FROM FIRST ADS IN DAISY LINE
for( i = 0; i < 3; i++ ) // read 3 byte status register (1100+LOFF_STATP+LOFF_STATN+GPIO[7:4])
{
inByte = ADS1298_ReadByte( );
stat_1 = ( stat_1 << 8 ) | inByte;
}
/*输出电极脱落状态*/
for( i = 0; i < 16; i++ )
{
uint8_t tmp = 0;
tmp = ( stat_1 >> ( 19 - i ) ) & 0x01;
if( tmp == 0x01 ) //导联脱落检测正常
{
if( i <= 7 )
{
printf( "第%d路正端脱落\r\n", 8 - i );
}
else
{
printf( "第%d路负端脱落\r\n", 16 - i );
}
}
}
for( i = 0; i < 8; i++ )
{
inByte1 = ADS1298_ReadByte( );
inByte2 = ADS1298_ReadByte( );
inByte3 = ADS1298_ReadByte( );
ADSChannelData[i] = ( inByte1 << 16 ) | ( inByte2 << 8 ) | inByte3;
}
printf( "%d\r\n", ADSChannelData[0] ); //数据输出不正常
}
4.主函数
int main( void )
{
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_2 ); //设置系统中断优先级分组2
delay_init( 168 ); //初始化延时函数
uart_init(115200);
ADS1298_Init();//
/*--1--测试读ID号和寄存器,测试通过*/
// while( 1 )
// {
// uint8_t IDtmp = 0;
// IDtmp = ADS1298_GetID();//正确应该是0x92
// IDtmp = IDtmp;
// delay_ms( 500 );
// ADS1298_WriteReg( 0x10, 0xff );
// delay_ms( 500 );
// IDtmp = ADS1298_ReadReg( 0x10 ); //应该是前面写的0xff
// IDtmp = IDtmp;
// }
ADS1298_WriteCmd(ADS1298_CMD_SDATAC);
while( 1 )
{
uint32_t tmp = 0;
ADS1298_WriteCmd(ADS1298_CMD_START);
while(ADS1298_IsReady()!=1);
ADS1298_ReadDataOneShot();
delay_ms(10);
tmp = ADSChannelData[0];
tmp = ADSChannelData[1];
tmp = ADSChannelData[2];
tmp = ADSChannelData[3];
tmp = ADSChannelData[4];
tmp = ADSChannelData[5];
tmp = ADSChannelData[6];
tmp = ADSChannelData[7];
}
}
5、判断是否转换结束函数,主函数中调用
uint8_t ADS1298_IsReady( void )
{
return ( ADS1298_PIN_DRDY == 0 );
}
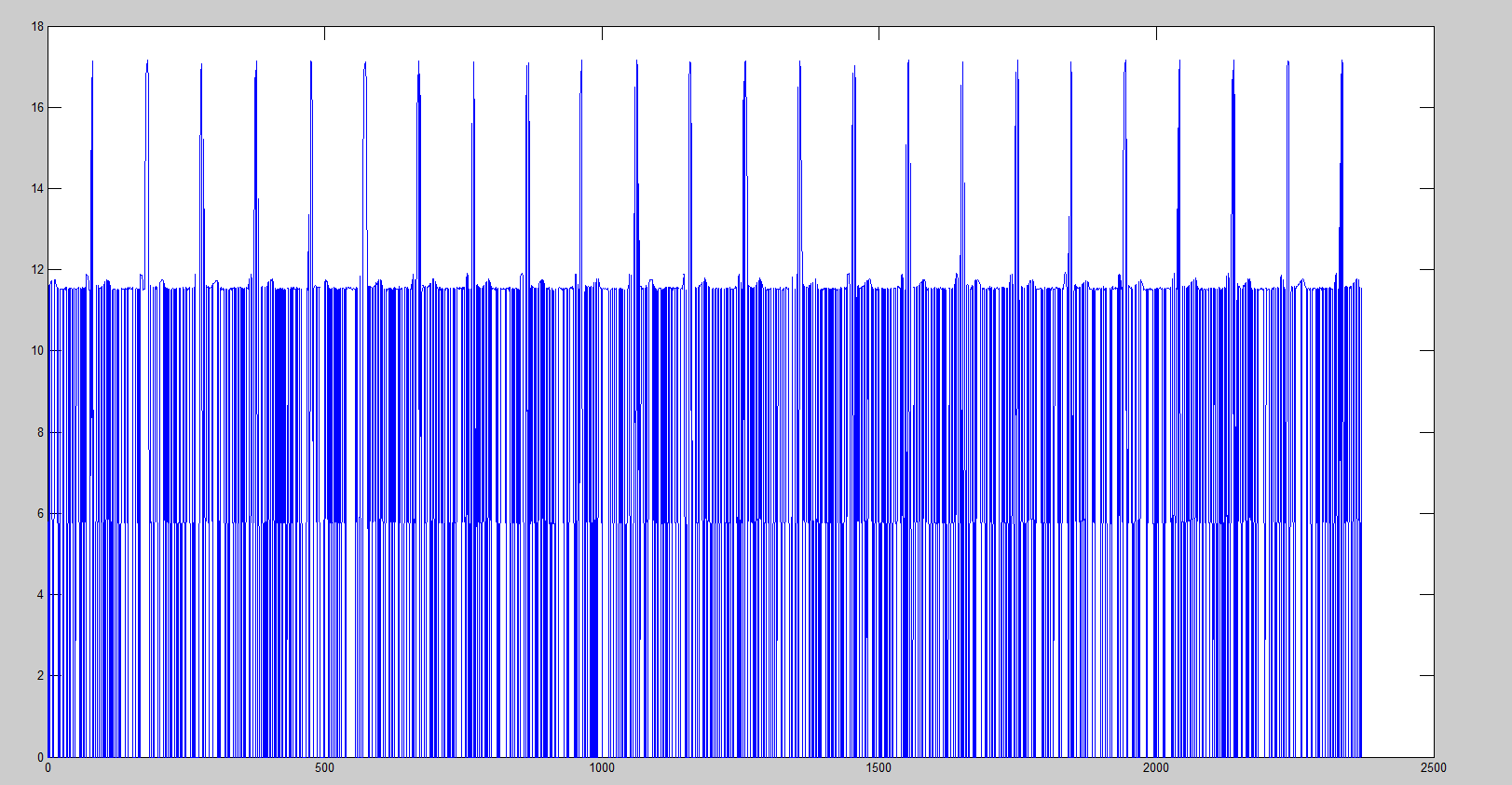
现在无论是否加心电信号源,通过printf函数串口输出的数据基本都是如下:
8388607
0
8388607
8388607
8388607
0
8388607
0
0
0
8388607
8388607
0
8388607
0
8388607
8388607
8388607
0
8388607
0
0
0
8388607
8388607
求助~