


编译结果如下,同样的配置为什么有些认识有些就不认识,是这个文件配置有错还是其他文件未声明之类的,有源代码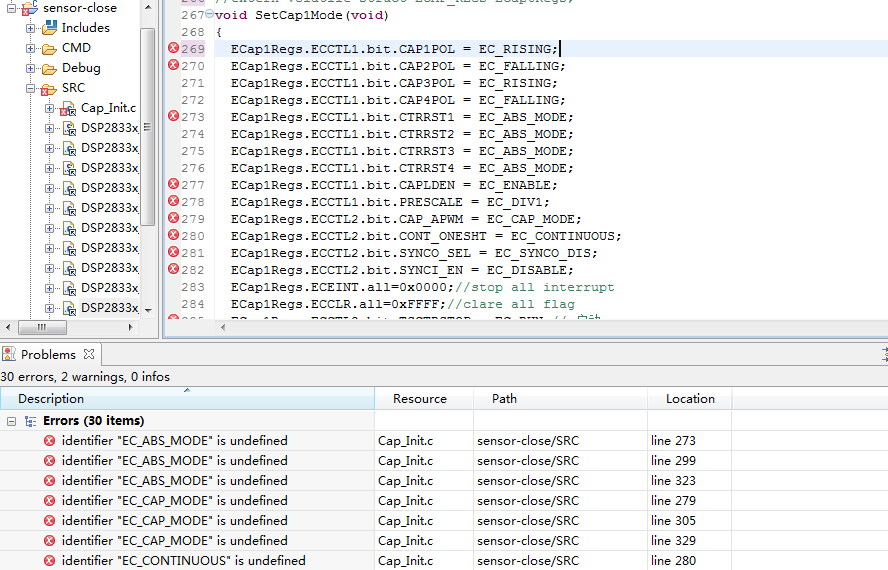
#include "DSP2833x_Device.h" // Headerfile Include File
#include "DSP2833x_Examples.h" // Examples Include File
// Functions that will be run from RAM need to be assigned to
// a different section. This section will then be mapped to a load and
// run address using the linker cmd file.
#pragma CODE_SECTION(InitFlash, "ramfuncs");
//---------------------------------------------------------------------------
// InitSysCtrl:
//---------------------------------------------------------------------------
// This function initializes the System Control registers to a known state.
// - Disables the watchdog
// - Set the PLLCR for proper SYSCLKOUT frequency
// - Set the pre-scaler for the high and low frequency peripheral clocks
// - Enable the clocks to the peripherals
void InitCapl(void)
{
ChoseCap();
InitECap1Gpio();
InitECap2Gpio();
InitECap3Gpio();
SetCap1Mode();
SetCap2Mode();
SetCap3Mode();
}
void ChoseCap(void)
{ SysCtrlRegs.PCLKCR1.bit.ECAP1ENCLK=1;//enable clock to Cap1
SysCtrlRegs.PCLKCR1.bit.ECAP2ENCLK=1;
SysCtrlRegs.PCLKCR1.bit.ECAP3ENCLK=1;
//SysCtrlRegs.PCLKCR1.bit.ECAP4ENCLK=1;
//SysCtrlRegs.PCLKCR1.bit.ECAP5ENCLK=1;
//SysCtrlRegs.PCLKCR1.bit.ECAP6ENCLK=1;
}
void InitECapGpio()
{
InitECap1Gpio();
#if (DSP28_ECAP2)
InitECap2Gpio();
#endif // endif DSP28_ECAP2
#if (DSP28_ECAP3)
InitECap3Gpio();
#endif // endif DSP28_ECAP3
#if (DSP28_ECAP4)
InitECap4Gpio();
#endif // endif DSP28_ECAP4
#if (DSP28_ECAP5)
InitECap5Gpio();
#endif // endif DSP28_ECAP5
#if (DSP28_ECAP6)
InitECap6Gpio();
#endif // endif DSP28_ECAP6
}
void InitECap1Gpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO5 = 0; // Enable pull-up on GPIO5 (CAP1)
GpioCtrlRegs.GPAPUD.bit.GPIO24 = 0; // Enable pull-up on GPIO24 (CAP1)
// GpioCtrlRegs.GPBPUD.bit.GPIO34 = 0; // Enable pull-up on GPIO34 (CAP1)
// Inputs are synchronized to SYSCLKOUT by default.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAQSEL1.bit.GPIO5 = 0; // Synch to SYSCLKOUT GPIO5 (CAP1)
GpioCtrlRegs.GPAQSEL2.bit.GPIO24 = 0; // Synch to SYSCLKOUT GPIO24 (CAP1)
// GpioCtrlRegs.GPBQSEL1.bit.GPIO34 = 0; // Synch to SYSCLKOUT GPIO34 (CAP1)
/* Configure eCAP-1 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be eCAP1 functional pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAMUX1.bit.GPIO5 = 3; // Configure GPIO5 as CAP1
GpioCtrlRegs.GPAMUX2.bit.GPIO24 = 1; // Configure GPIO24 as CAP1
// GpioCtrlRegs.GPBMUX1.bit.GPIO34 = 1; // Configure GPIO24 as CAP1
EDIS;
}
#if DSP28_ECAP2
void InitECap2Gpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO7 = 0; // Enable pull-up on GPIO7 (CAP2)
GpioCtrlRegs.GPAPUD.bit.GPIO25 = 0; // Enable pull-up on GPIO25 (CAP2)
// GpioCtrlRegs.GPBPUD.bit.GPIO37 = 0; // Enable pull-up on GPIO37 (CAP2)
// Inputs are synchronized to SYSCLKOUT by default.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAQSEL1.bit.GPIO7 = 0; // Synch to SYSCLKOUT GPIO7 (CAP2)
GpioCtrlRegs.GPAQSEL2.bit.GPIO25 = 0; // Synch to SYSCLKOUT GPIO25 (CAP2)
// GpioCtrlRegs.GPBQSEL1.bit.GPIO37 = 0; // Synch to SYSCLKOUT GPIO37 (CAP2)
/* Configure eCAP-2 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be eCAP2 functional pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAMUX1.bit.GPIO7 = 3; // Configure GPIO7 as CAP2
GpioCtrlRegs.GPAMUX2.bit.GPIO25 = 1; // Configure GPIO25 as CAP2
// GpioCtrlRegs.GPBMUX1.bit.GPIO37 = 3; // Configure GPIO37 as CAP2
EDIS;
}
#endif // endif DSP28_ECAP2
#if DSP28_ECAP3
void InitECap3Gpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO9 = 0; // Enable pull-up on GPIO9 (CAP3)
GpioCtrlRegs.GPAPUD.bit.GPIO26 = 0; // Enable pull-up on GPIO26 (CAP3)
// Inputs are synchronized to SYSCLKOUT by default.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAQSEL1.bit.GPIO9 = 0; // Synch to SYSCLKOUT GPIO9 (CAP3)
GpioCtrlRegs.GPAQSEL2.bit.GPIO26 = 0; // Synch to SYSCLKOUT GPIO26 (CAP3)
/* Configure eCAP-3 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be eCAP3 functional pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAMUX1.bit.GPIO9 = 3; // Configure GPIO9 as CAP3
GpioCtrlRegs.GPAMUX2.bit.GPIO26 = 1; // Configure GPIO26 as CAP3
EDIS;
}
#endif // endif DSP28_ECAP3
#if DSP28_ECAP4
void InitECap4Gpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO11 = 0; // Enable pull-up on GPIO11 (CAP4)
// GpioCtrlRegs.GPAPUD.bit.GPIO27 = 0; // Enable pull-up on GPIO27 (CAP4)
// Inputs are synchronized to SYSCLKOUT by default.
// Comment out other unwanted lines.
//限定器选择1寄存器GPIO 0-15
GpioCtrlRegs.GPAQSEL1.bit.GPIO11 = 0; // Synch to SYSCLKOUT GPIO11 (CAP4)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO27 = 0; // Synch to SYSCLKOUT GPIO27 (CAP4)
/* Configure eCAP-4 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be eCAP4 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO11 = 3; // Configure GPIO11 as CAP4
// GpioCtrlRegs.GPAMUX2.bit.GPIO27 = 1; // Configure GPIO27 as CAP4
EDIS;
}
#endif // endif DSP28_ECAP4
#if DSP28_ECAP5
void InitECap5Gpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO3 = 0; // Enable pull-up on GPIO3 (CAP5)
// GpioCtrlRegs.GPBPUD.bit.GPIO48 = 0; // Enable pull-up on GPIO48 (CAP5)
// Inputs are synchronized to SYSCLKOUT by default.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAQSEL1.bit.GPIO3 = 0; // Synch to SYSCLKOUT GPIO3 (CAP5)
// GpioCtrlRegs.GPBQSEL2.bit.GPIO48 = 0; // Synch to SYSCLKOUT GPIO48 (CAP5)
/* Configure eCAP-5 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be eCAP5 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO3 = 2; // Configure GPIO3 as CAP5
// GpioCtrlRegs.GPBMUX2.bit.GPIO48 = 1; // Configure GPIO48 as CAP5
EDIS;
}
#endif // endif DSP28_ECAP5
#if DSP28_ECAP6
void InitECap6Gpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO1 = 0; // Enable pull-up on GPIO1 (CAP6)
// GpioCtrlRegs.GPBPUD.bit.GPIO49 = 0; // Enable pull-up on GPIO49 (CAP6)
// Inputs are synchronized to SYSCLKOUT by default.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAQSEL1.bit.GPIO1 = 0; // Synch to SYSCLKOUT GPIO1 (CAP6)
// GpioCtrlRegs.GPBQSEL2.bit.GPIO49 = 0; // Synch to SYSCLKOUT GPIO49 (CAP6)
/* Configure eCAP-5 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be eCAP6 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 2; // Configure GPIO1 as CAP6
// GpioCtrlRegs.GPBMUX2.bit.GPIO49 = 1; // Configure GPIO49 as CAP6
EDIS;
}
#endif // endif DSP28_ECAP6
//extern volatile struct ECAP_REGS ECap1Regs;
//extern volatile struct ECAP_REGS ECap2Regs;
//extern volatile struct ECAP_REGS ECap3Regs;
//extern volatile struct ECAP_REGS ECap4Regs;
//extern volatile struct ECAP_REGS ECap5Regs;
//extern volatile struct ECAP_REGS ECap6Regs;
void SetCap1Mode(void)
{
ECap1Regs.ECCTL1.bit.CAP1POL = EC_RISING;
ECap1Regs.ECCTL1.bit.CAP2POL = EC_FALLING;
ECap1Regs.ECCTL1.bit.CAP3POL = EC_RISING;
ECap1Regs.ECCTL1.bit.CAP4POL = EC_FALLING;
ECap1Regs.ECCTL1.bit.CTRRST1 = EC_ABS_MODE;
ECap1Regs.ECCTL1.bit.CTRRST2 = EC_ABS_MODE;
ECap1Regs.ECCTL1.bit.CTRRST3 = EC_ABS_MODE;
ECap1Regs.ECCTL1.bit.CTRRST4 = EC_ABS_MODE;
ECap1Regs.ECCTL1.bit.CAPLDEN = EC_ENABLE;
ECap1Regs.ECCTL1.bit.PRESCALE = EC_DIV1;
ECap1Regs.ECCTL2.bit.CAP_APWM = EC_CAP_MODE;
ECap1Regs.ECCTL2.bit.CONT_ONESHT = EC_CONTINUOUS;
ECap1Regs.ECCTL2.bit.SYNCO_SEL = EC_SYNCO_DIS;
ECap1Regs.ECCTL2.bit.SYNCI_EN = EC_DISABLE;
ECap1Regs.ECEINT.all=0x0000;//stop all interrupt
ECap1Regs.ECCLR.all=0xFFFF;//clare all flag
ECap1Regs.ECCTL2.bit.TSCTRSTOP = EC_RUN;// 启动
ECap1Regs.ECEINT.bit.CEVT1=1;// Enable cevt1 interrupt
ECap1Regs.ECEINT.bit.CEVT2=1;// Enable cevt2 interrupt
ECap1Regs.ECEINT.bit.CEVT3=1;// Enable cevt3 interrupt
ECap1Regs.ECEINT.bit.CEVT4=1;// Enable cevt4 interrupt
}
void SetCap2Mode(void)
{
ECap2Regs.ECCTL1.bit.CAP1POL = EC_RISING;
ECap2Regs.ECCTL1.bit.CAP2POL = EC_FALLING;
ECap2Regs.ECCTL1.bit.CAP3POL = EC_RISING;
ECap2Regs.ECCTL1.bit.CAP4POL = EC_FALLING;
ECap2Regs.ECCTL1.bit.CTRRST1 = EC_ABS_MODE;
ECap2Regs.ECCTL1.bit.CTRRST2 = EC_ABS_MODE;
ECap2Regs.ECCTL1.bit.CTRRST3 = EC_ABS_MODE;
ECap2Regs.ECCTL1.bit.CTRRST4 = EC_ABS_MODE;
ECap2Regs.ECCTL1.bit.CAPLDEN = EC_ENABLE;
ECap2Regs.ECCTL1.bit.PRESCALE = EC_DIV1;
ECap2Regs.ECCTL2.bit.CAP_APWM = EC_CAP_MODE;
ECap2Regs.ECCTL2.bit.CONT_ONESHT = EC_CONTINUOUS;
ECap2Regs.ECCTL2.bit.SYNCO_SEL = EC_SYNCO_DIS;
ECap2Regs.ECCTL2.bit.SYNCI_EN = EC_DISABLE;
ECap2Regs.ECEINT.all=0x0000;//stop all interrupt
ECap2Regs.ECCLR.all=0xFFFF;//clare all flag
ECap2Regs.ECCTL2.bit.TSCTRSTOP = EC_RUN;// 启动
ECap2Regs.ECEINT.bit.CEVT1=1;// Enable cevt1 interrupt
ECap2Regs.ECEINT.bit.CEVT2=1;// Enable cevt2 interrupt
ECap2Regs.ECEINT.bit.CEVT3=1;// Enable cevt3 interrupt
ECap2Regs.ECEINT.bit.CEVT4=1;// Enable cevt4 interrupt
}
void SetCap3Mode(void)
{
ECap3Regs.ECCTL1.bit.CAP1POL = EC_RISING;
ECap3Regs.ECCTL1.bit.CAP2POL = EC_FALLING;
ECap3Regs.ECCTL1.bit.CAP3POL = EC_RISING;
ECap3Regs.ECCTL1.bit.CAP4POL = EC_FALLING;
ECap3Regs.ECCTL1.bit.CTRRST1 = EC_ABS_MODE;
ECap3Regs.ECCTL1.bit.CTRRST2 = EC_ABS_MODE;
ECap3Regs.ECCTL1.bit.CTRRST3 = EC_ABS_MODE;
ECap3Regs.ECCTL1.bit.CTRRST4 = EC_ABS_MODE;
ECap3Regs.ECCTL1.bit.CAPLDEN = EC_ENABLE;
ECap3Regs.ECCTL1.bit.PRESCALE = EC_DIV1;
ECap3Regs.ECCTL2.bit.CAP_APWM = EC_CAP_MODE;
ECap3Regs.ECCTL2.bit.CONT_ONESHT = EC_CONTINUOUS;
ECap3Regs.ECCTL2.bit.SYNCO_SEL = EC_SYNCO_DIS;
ECap3Regs.ECCTL2.bit.SYNCI_EN = EC_DISABLE;
ECap3Regs.ECEINT.all=0x0000;//stop all interrupt
ECap3Regs.ECCLR.all=0xFFFF;//clare all flag
ECap3Regs.ECCTL2.bit.TSCTRSTOP = EC_RUN;// 启动
ECap3Regs.ECEINT.bit.CEVT1=1;// Enable cevt1 interrupt
ECap3Regs.ECEINT.bit.CEVT2=1;// Enable cevt2 interrupt
ECap3Regs.ECEINT.bit.CEVT3=1;// Enable cevt3 interrupt
ECap3Regs.ECEINT.bit.CEVT4=1;// Enable cevt4 interrupt
}
//===========================================================================
// End of file.
//===========================================================================
