This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
我用的是tm4c1233e6pm的芯片,哪位大哥能发个两块板子的通信例程给我看看,或者有相关借鉴的资料也行
两个板子,一个设置为发送,一个设置为接受,例程你查看TIVA C中给的例程
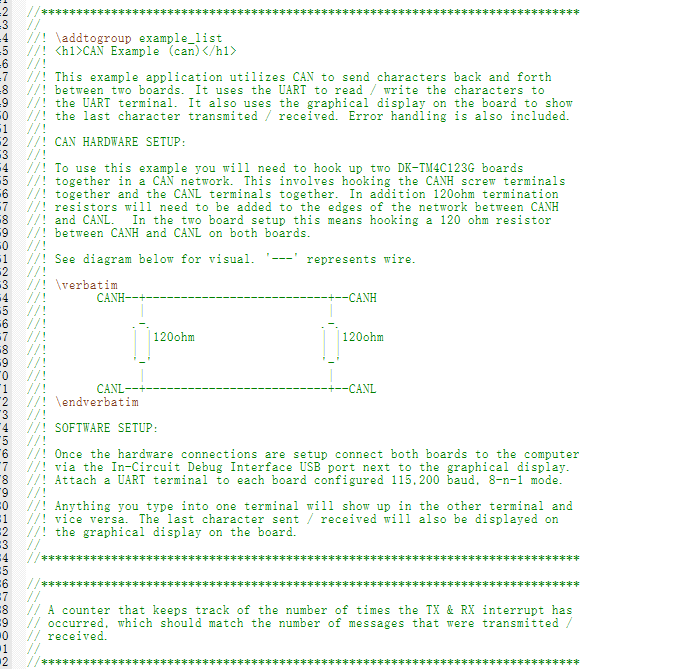
用这个例程:
C:\ti\TivaWare_C_Series-2.1.0.12573\examples\boards\dk-tm4c123g\can
把两个板子的CANL CANH连一起,挂上120欧的匹配电阻。
您好 ,请问能不能告诉我TivaWare_C_Series-2.1.0.1257软件在那下载,给一个链接也行,谢谢!,我需要驱动库。
http://www.ti.com.cn/tool/cn/sw-ek-tm4c123gxl
应该是在这里下载的。TIVA WARE开发包。
请问TM4C129内部有集成CAN收发器吗? 直接将两个芯片的CAN 引脚对接可以通信吗?
不可以的,CAN走的协议不一样的,如要加CAN收发器,将TX和RX转换为CANH和CANL才可以进行收发的。
我的意思是 能不能不用can收发器,直接将两块板子的CAN TX和CAN RX对接进行通信?
不可以。
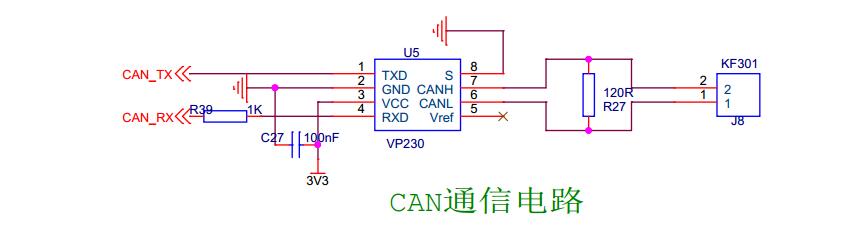
那这里已经有收发器了吗
自己制板的话是不是要加这么个电路
对的,自己画板子的时候,必须加VP230这个器件。就像485一样,CAN的协议也是差分信号,CANH和CANL,必须要将IO口的TX和RX转为CANH和CANL才能走CAN总线协议的。
CAN控制器通过组成总线的2根线(CAN-H和CAN-L)的电位差来确定总线的电平,在任一时刻,总线上有2种电平:显性电平和隐性电平。
好的 谢谢
EK-TM4C129评估板好像没看到有集成了can收发器。不过我买了个CAN收发器模块。我按照官方例程初始化了CAN1不能用,用示波器检测PB0和PB1引脚电平不会变化(程序里连续发送数据)。
#define CAN1RXID 0#define RX1BJECT 1#define CAN1TXID 2#define TX1BJECT 2
extern uint32_t ui32SysClock;tCANMsgObject g_sCAN1RxMessage;tCANMsgObject g_sCAN1TxMessage;
u8 g_ui8TXMsgData;u8 g_ui8RXMsgData;
/* ================================================================================描述 : 输入 : 输出 : ================================================================================*/void CAN1IntHandler(void){ uint32_t ui32Status; u8 MsgData; ui32Status = CANIntStatus(CAN1_BASE, CAN_INT_STS_CAUSE); if(ui32Status == CAN_INT_INTID_STATUS) { ui32Status = CANStatusGet(CAN1_BASE, CAN_STS_CONTROL); UARTCharPut(UART0_BASE,'3'); } else if(ui32Status == RX1BJECT) { CANIntClear(CAN1_BASE, RX1BJECT); g_sCAN1RxMessage.pui8MsgData = (u8 *) &MsgData; CANMessageGet(CAN1_BASE, RX1BJECT, &g_sCAN1RxMessage, 0); UARTCharPut(UART0_BASE,MsgData); } else if(ui32Status == TX1BJECT) { CANIntClear(CAN1_BASE, TX1BJECT); UARTCharPut(UART0_BASE,'4'); } else { UARTCharPut(UART0_BASE,'5'); } }
/* ================================================================================描述 : 输入 : 输出 : ================================================================================*/void CAN_Init(void){ SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB); GPIOPinConfigure(GPIO_PB0_CAN1RX); GPIOPinConfigure(GPIO_PB1_CAN1TX); GPIOPinTypeCAN(GPIO_PORTB_BASE, GPIO_PIN_0 | GPIO_PIN_1); SysCtlPeripheralEnable(SYSCTL_PERIPH_CAN1); CANInit(CAN1_BASE); CANBitRateSet(CAN1_BASE, ui32SysClock, 500000); CANIntRegister(CAN1_BASE,CAN1IntHandler);//注册中断函数 CANIntEnable(CAN1_BASE, CAN_INT_MASTER | CAN_INT_ERROR | CAN_INT_STATUS); IntEnable(INT_CAN1); CANEnable(CAN1_BASE);
g_sCAN1RxMessage.ui32MsgID = 0; g_sCAN1RxMessage.ui32MsgIDMask = 0; g_sCAN1RxMessage.ui32Flags = MSG_OBJ_RX_INT_ENABLE | MSG_OBJ_USE_ID_FILTER; g_sCAN1RxMessage.ui32MsgLen = sizeof(g_ui8RXMsgData); CANMessageSet(CAN1_BASE, RX1BJECT, &g_sCAN1RxMessage, MSG_OBJ_TYPE_RX); g_ui8TXMsgData = 0; g_sCAN1TxMessage.ui32MsgID = 1; g_sCAN1TxMessage.ui32MsgIDMask = 0; g_sCAN1TxMessage.ui32Flags = MSG_OBJ_TX_INT_ENABLE; g_sCAN1TxMessage.ui32MsgLen = sizeof(g_ui8TXMsgData); g_sCAN1TxMessage.pui8MsgData = (uint8_t *)&g_ui8TXMsgData; }
/* ================================================================================描述 : 主程序内循环调用输入 : 输出 : ================================================================================*/void CAN_Main(void){ g_ui8TXMsgData=0x37; CANMessageSet(CAN1_BASE, TX1BJECT, &g_sCAN1TxMessage,MSG_OBJ_TYPE_TX); UARTprintf("HJ\n");
}
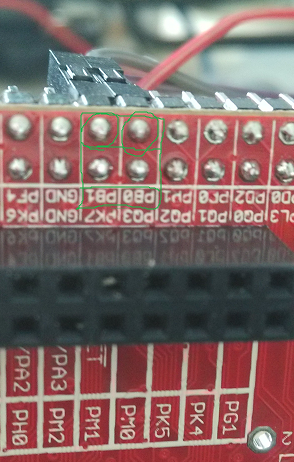
我看EK-TM4C129x的板子,好像你作为CAN引脚的PB0和PB1没有被引出来,你是如何连接的呢?
有的 如图,绿线圈起来那里。
是的,看错了。我看的是BoosterPack Interface的引脚图,直插的是引出来了。
初始化CAN引脚,并且抓不到波形,那肯定是你的CAN没有配置好,能抓到波形和你配置的一致,CAN才算配置OK的。至于CAN的配置,应该是这个例程可以拿来直接用的
ti\TivaWare_C_Series-2.1.3.156\examples\peripherals\can
不过具体没看他用的是CAN0还是CAN1
好像是评估板有点问题,我用自己制作的板子把 PB0 PB1直接引出来接CAN收发器就可以使用了。